
Pierre-Alain « Panoramix » m’a soumis l’intéressante question suivante: Les pédales de vélo ont des filetages de sens opposé, à droite (standard) pour la pédale de droite et à gauche pour celle de gauche. A première vue, l’explication est simple et logique: c’est pour éviter que l‘une des deux pédales se desserre lors de l’utilisation. Oui, mais… En […]
Mécanique
19 articles
Après une petite pause due en partie au déménagement de ce blog suite à des problèmes d’hébergement, je vous propose une traduction de l’article « Falling faster than gravity » de Sedeer sur Inspiring Science. Pour la petite histoire, ça me rappelle une question que je m’étais posé une nuit d’insomnie à bord d’ « Etoile Filante » : ma couchette pouvait-elle vraiment tomber plus vite que moi lorsque le bateau franchissait une vague ?

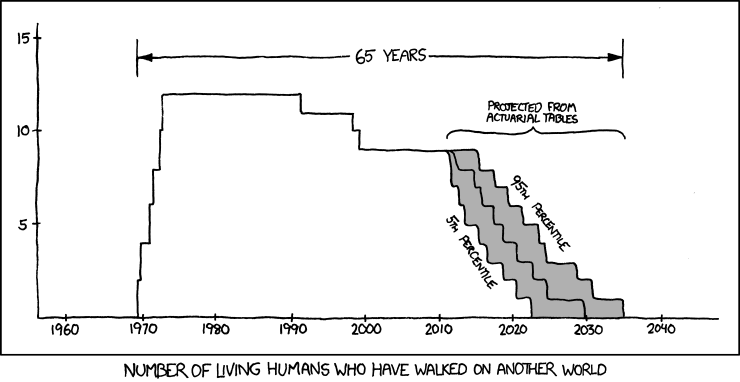
Après « le petit pas » de Neil Armstrong, le « grand bond pour l’humanité » dans l’espace se fait attendre. Après quelques rappels historiques sur le programme Apollo, Dr. Goulu présente la notion de « puits gravitationnel » qui permet de visualiser l’énergie nécessaire aux voyages interplanétaires. Si l’on se représente la Terre comme située au fond d’un puits de 6’300 km lui même situé quelque 10’000 km plus bas que Mars, on comprend mieux la difficulté d’un voyage habité vers la planète rouge. Surtout si c’est un aller-retour.

Un collègue est arrivé au boulot tout excité par le « moteur magnétique » présenté par un certain Aurélien Prévost à l’émission « l’inventeur 2012 » sur M6. Il s’agit d’une « rampe de lancement » magnétique déjà brevetée en 1977.
Après une petite démo de la version linéaire du moteur qui pourrait étonner ceux qui n’ont jamais joué avec des Geomags ou autres aimants, Aurélien explique calmement kyaka refermer la rampe pour former un circuit circulaire fermé et fixer les billes à une roue pour que celle-ci tourne toute seule, grâce à un moteur magnétique qui ne nécessite ni carburant ni batterie.
L’enthousiasme du jury pour cette « invention » qui va permettre à la France d’alimenter le monde en énergie gratuite fait peine à voir dans un premier temps. Seuls quelques membres du jury demandent à en voir plus, et aucun ne prononce les 2 mots qui qualifient cette « invention » dès le premier coup d’oeil scientifique : « bull shit ». En français : « mouvement perpétuel ».

Chaque fois que vous arrêtez votre voiture à un feu rouge, son énergie cinétique et la votre sont dissipées sous forme de chaleur dans vos freins. Quand le feu passe au vert, votre moteur régénère cette énergie cinétique en accélérant votre véhicule. Dès les années 50, Richard Feynman (encore lui) avait imaginé un système de récupération de l’énergie […]

Cet article est parti d’une question de Michel : « pourquoi l’araignée ne tourne pas au bout de son fil ? » . Les réponses que l’on trouve sur le web se réfèrent principalement aux étonnantes propriétés mécaniques du fil d’araignée [1]. D’un diamètre de 2 à 15 microns selon les espèces, il peut soutenir une traction de plusieurs […]
Mon premier gyroscope était une simple toupie montée dans une cage articulée : une fois lancée à l’aide d’un bout de ficelle, l’axe de la toupie reste insensible aux mouvements du support de la cage, magique. L’horizon artificiel indispensable aux pilotes n’était initialement qu’une version motorisée de mon jouet d’enfant, mais Foucault ayant démontré qu’un […]

La spectaculaire mise à l’eau d’Alinghi 5 par une « grue volante » Mil MI-26 est l’occasion de parler un peu de ces merveilles technologiques. Pour le bateau, visitez le blog Foilers! Pour l’hélico, lisez la suite. Le MI-26 pèse 28 tonnes à vide et peut déplacer une charge maximale de 20 tonnes à l’aide de 8 […]
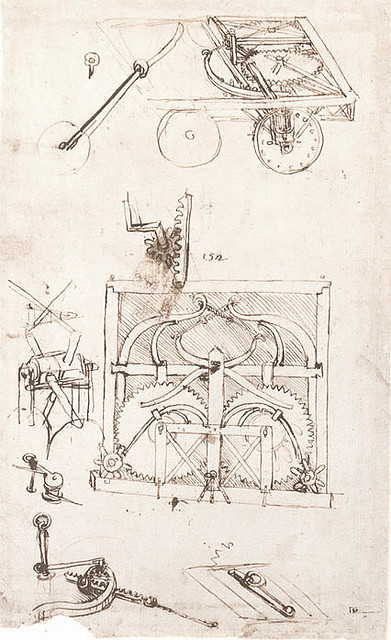
Autour de 1493, Léonard de Vinci esquisse un chariot ingénieux, apparemment conçu pour parcourir un chemin « programmé » à l’aide de cames. SolidWorks vous explique son fonctionnement en détail sur le site real geniuses, en le mêlant à une démonstration de leur logiciel de CAO 3D sur un ton parfois un peu trop commercial, mais c’est […]

{kind=link}
{kind=link}
{kind=link}
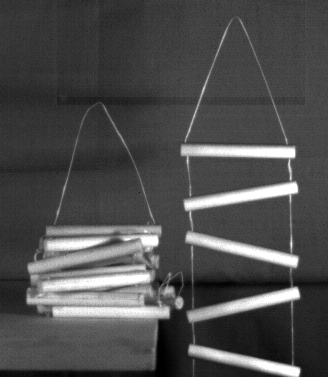
« L’ingénieur des Mines construit un pont, celui-ci s’écroule, il ne sait pas pourquoi. Le Polytechnicien construit un pont, celui-ci s’écroule mais il sait pourquoi. Le gars des Arts et Métiers construit un pont, et il ne sait pas pourquoi, mais ça tient.« Les concours de ponts en spaghetti s’attaquent à ce décalage bien connu entre […]